|
Home
News
People
Research
Publications
Courses
Seminars
Data & Code
Contact Us
Calendar
Other Links
|
|
|
|
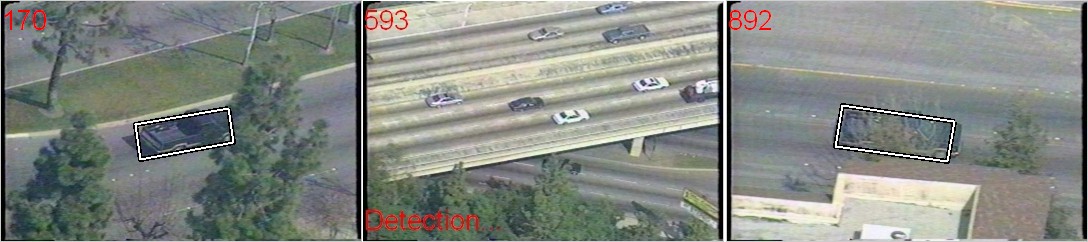
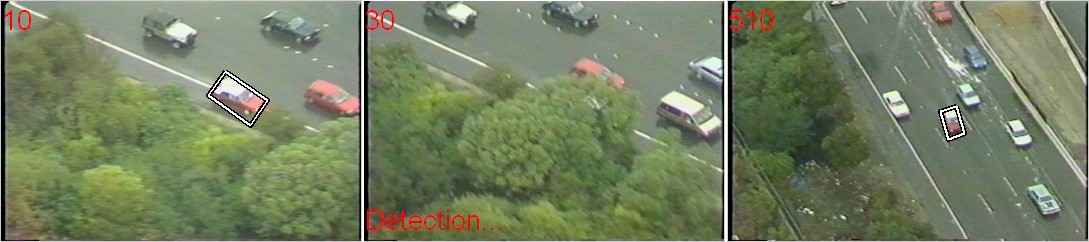
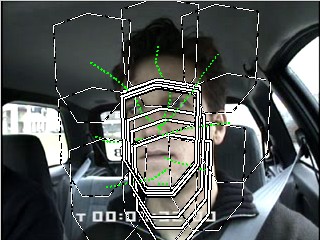
Object Tracking and Detection after Occlusion via Numerical Hybrid Local and
Global Mode-seeking
|

|
Abstract
Given an object model and a black-box measure of similarity
between the model and candidate targets, we consider
visual object tracking as a numerical optimization problem.
During normal tracking conditions when the object is visible
from frame to frame, local optimization is used to track
the local mode of the similarity measure in a parameter
space of translation, rotation and scale. However, when
the object becomes partially or totally occluded, such local
tracking is prone to failure, especially when common prediction
techniques like the Kalman filter do not provide a
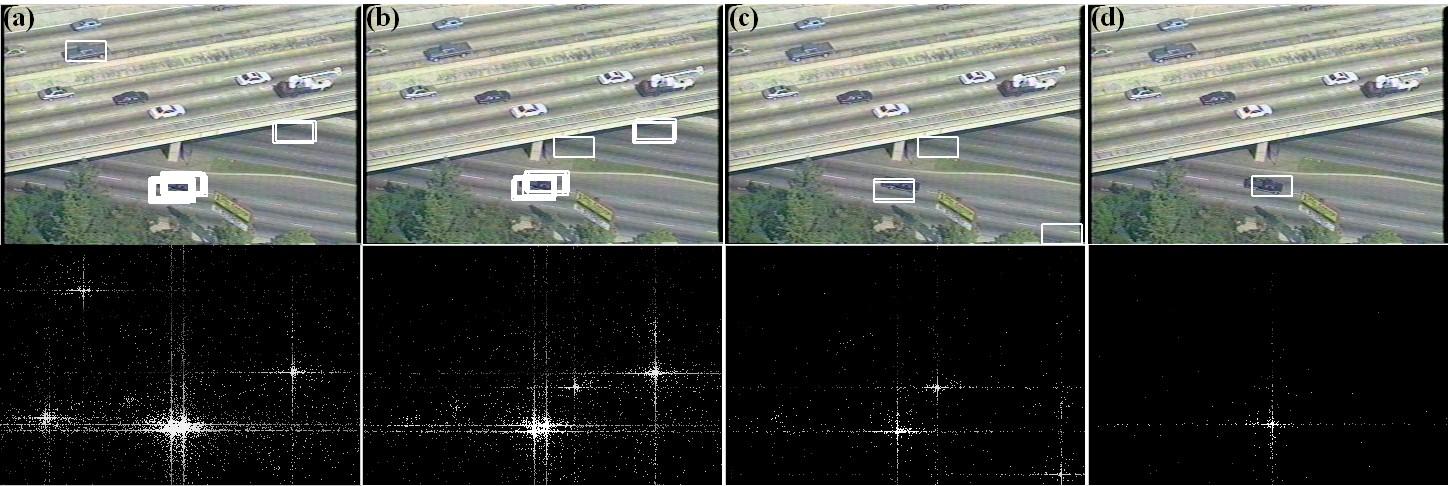
good estimate of object parameters in future frames. To recover
from these inevitable tracking failures, we consider
object detection as a global optimization problem and solve
it via Adaptive Simulated Annealing (ASA), a method that
avoids becoming trapped at local modes and is much faster
than exhaustive search. As a Monte Carlo approach, ASA
stochastically samples the parameter space, in contrast to
local deterministic search. We apply cluster analysis on the
sampled parameter space to redetect the object and renew
the local tracker. Our numerical hybrid local and global
mode-seeking tracker is validated on challenging airborne
videos with heavy occlusion and large camera motions.
Our approach outperforms state-of-the-art trackers on the
VIVID benchmark datasets.
Citation

|
Zhaozheng Yin and Robert T. Collins. Object Tracking and Detection after Occlusion via Numerical Hybrid Local and
Global Mode-seeking , IEEE Computer Vision and Pattern Recognition (CVPR'08), Anchorage, Alaska, June 2008. [PDF]
|
Results (video demos)
|
|